por
John R. Fischer, Senior Reporter | September 27, 2023

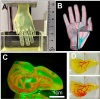
The needle follows AI-generated instructions to reach the target and avoid anatomical structures.
While medical robots have made it easier to treat conditions in hard-to-reach places of the body, certain structures, such as blood vessels and nerves, are still challenging to navigate. Now, for the first time, researchers at the University of North Carolina at Chapel Hill have developed an AI-instructed solution in the form of a needle that can autonomously steer around these anatomical objects.
Working with a radiologist and interventional pulmonologist from UNC School of Medicine, computer scientist professor Ron Alterovitz designed the robotic needle to circumnavigate through living tissues based on instructions from AI-based software to reach targets within models of a breathing lung, one of the most challenging organs. These directions, combined with the needle’s flexibility, allow it to bend around nerves, blood vessels, and other structures.
The researchers, which also included engineers and computer scientists from Vanderbilt University and the University of Utah, say that such a solution could potentially be used in biopsies, directed drug delivery, and localized radiotherapy.



Ad Statistics
Times Displayed: 15573
Times Visited: 44 Brand-New FDA-cleared Advanced Ultrasound Medical Device available for sale or lease to Wound Care Centers or any other Medical Facilities.The Arobella 1000D is designed for non-contact or debridement ultrasound wound healing therapy, or any other wounds
Due to being minimally invasive, the needle could reduce pain and recovery time, and by being made autonomous, it could allow for more precise treatment administration, reducing inaccurate diagnoses and the potential for complications.
“The autonomous steerable needle we’ve developed is highly compact, but the system is packed with a suite of technologies that allow the needle to navigate autonomously in real time. It’s akin to a self-driving car, said Alterovitz in a statement.
Alterovitz and his colleagues positioned and launched the needle in the models. The AI software instructed it on where the target was, and how to travel to it while avoiding certain objects. The needle was made from a nickel-titanium alloy and was laser etched to increase its flexibility so it could move effortlessly. The etching also allowed it to steer around obstacles more easily.
Other attachments such as catheters could be used with the needle to perform procedures such as lung biopsies. A mechanical control provided the needle’s thrust, allowing it to go forward and back, while the design of the needle allowed it to move along curved paths. Alterovitz and his colleagues plan to refine the system further to bring it closer to being clinically adopted and will explore new applications that can be applied with it.
“We plan to continue creating new autonomous medical robots that combine the strengths of robotics and AI to improve medical outcomes for patients facing a variety of health challenges, while providing guarantees on patient safety.”
The results were published in
Science Robotics.